天先数智科技(深圳)有限公司
TSUN ELECTRONIC TECHNOLOGY(SHENZHEN) CO.,LTD


WeChat/咨询

摘要:为了提高转台伺服系统精度、抗干扰能力和提高可靠性,设计了一种基于磁栅位移传感器的角度测量装置。该装置以嵌入式微处理器STM32F103为核心构建,设计采用磁栅位移传感器,这种传感器能将位移信号转化为两路具有相位差的脉冲信号,将脉冲信号传输至STM32F103进行计数最终将对位移的测量转化为对角度的测量,通过串口传送到上位机给出结果显示实验结果表明该装置具有较高的可靠性和测量精度。
关键字:磁栅尺;角度测量;信号采集
角度的测量是伺服转台系统的一个重要组成部分,目前广泛应用的角度测量传感器一般有光电编码器、光栅传感器2、正余弦旋转变压器等。光栅式传感器大量程测量精度仅低于激光干涉传感器,光栅测量技术成熟,精度和分辨率较高,应用较广泛。但由于机械振动易使光栅尺破碎,光栅尺抗冲击性、抗振性能不高,光器件的使用寿命短,结构定位组装复杂,成本较高,而正余弦变压器虽然构造简单,但是容易损坏不易维修。文中基于STM32微控制器,应用磁栅位移传感器设计了一种角度测量装置4,并且给出其硬件电路设计了及软件模块,最后通过实验对其测量精度和可靠性进行了验证。
1系统硬件设计及原理
1.1角度测量系统总体设计
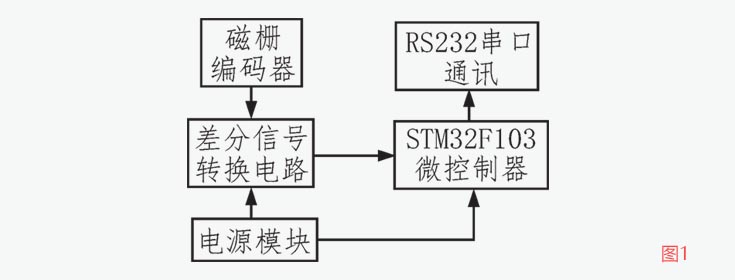
角度测量系统硬件电路以ARM处理器为核心,由系统电源电路,传感器电路,通讯接口电路和主控芯片电路等5部分组成,本系统的硬件总体结构如图1所示。
1.2 STM32F103微控制器
本系统是高精度的位移测量传感器的信号处理系统,由于ST提供了完整的开发工具和库函数,使得用户方便的访问STM32的标准外设。因而在本设计中选择意法半导体ST公司推出的STM32F103微控制器STM32系列的微控制器是由意法半导体公司生产的基于 ARM Cortex--M3内核的微控制器,具有高性能、低成本、低功耗等特点。工作频率可达70MHz,内置高速存储器(128 kB Flash,20 kB SRAM),拥有丰富的增强I端口(大部分IO端口可5V兼容)和 USART、SPI、I2S、ADC、DAC等众多外设功能,提供84个中断、16级可配置优先级,并且可在-40~105℃的温度下工作。
1.3磁栅位移传感器的工作原理
磁栅位移传感器是一种可将位移转换为数字脉冲的传感器-12,这种传感器由磁栅尺、磁头组成。当磁头在尺上面发生位置变化时,编码器产生周期性的增量脉冲,因此,实现对脉冲的计数就可以完成对位移的测量。编码器可输出A,B,Z3个信号,其中A,B两路信号为相位相差90°的方波信号,Z相为每转一圈的标志信号,每圈只产生一个脉冲,信号波形图如图2所示。
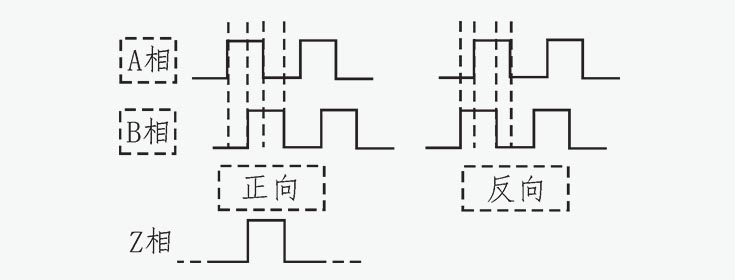
由波形图可以看出,在一个周期内,相位相差90°的AB两路信号可以有4种电平组合,分别是下图的4种组合状态。当磁头正向移动时,状态变化为10>11>01>00,反向移动时,状态变化为01>11>10>00,并且以此周期性循环,可以看到,无论在正向还是在反向移动的情况下,对于任意一个状态,它的前一个或后一个状态是唯一确定的。例如状态11,在正向移动时,前一个状态是10,后一个状态是01,而在反向移动式,前一个状态是01,后一个状态是10。因此,可根据A、B相组合电平的变化来判断磁头的移动方向和四倍频的细分计数。
1.4差分信号转换电路
在系统实验中,由于要采用磁柵尺作为位移传感器,而磁柵尺传感器输出的是差分信号,因而我们在信号处理系统中集成了差分信号转换电路,将磁栅尺输出的差分信号进行转换后送入下位机,由处理器芯片读取脉冲信号进行计数得到的数据通过RS232通讯接口送给上位机进行处理显示。转换电路如图3所示。
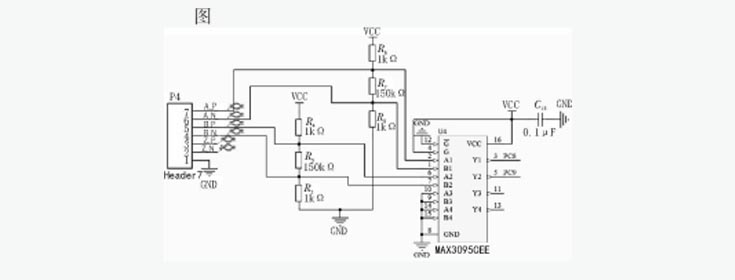
本设计中采用MAX3095作为传感器差分信号转换芯片,MAX3095是美国美信公司生产的四通道RS422/RS485发送器,其采用单5V电源供电,支持热插拔,具有ESD保护电路,因而能很好的实现光栅输入的差分信号的转换,本模块具体电路原理如图所示。经过磁栅输入的3对差分信号(六路)经过阻抗匹配电路后分别送入MAX3095芯片的3个通道,经过芯片接收转换后,转变成处理器能够识别的TTL信号送入STM32进行后续处理。
1.5 RS232串口电路
STM32F103芯片内部集 USART成有3个,因此本系统与上位机通讯通过RS-232串行接口来实现13-141,其结构简单,使用方便。本设计选用美信公司的MAX3232串口驱动芯片,该芯片是美信公司专门为电脑的RS-232标准接口设计的单电源电平转换芯片,使用+5V单电源供电,具有片载电荷泵升压、电压极性反转能力和功耗低等特点。内部集成2个RS-232驱动器和2个RS-232接收器。具体电路如图4所示。

2 软件设计
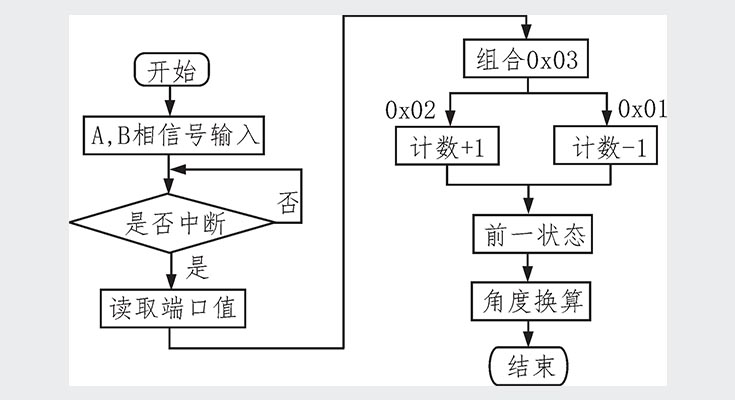
在本方案中,编码器A、B相的信号输入到STM32微控制器引脚,由两信号的上升和下降边沿分别触发中断请求,调用 GPIO ReadInput DataBit函数来读取引脚的输入值,高电平是1,低电平是0,从而得到A、B相信号组合的编码值,并根据现组合编码值的前一个状态来判断编码器是正转还是反转,正转则计数加1,反转则计数减1。例如,现得到组合状态值11,如果前一状态是10,则编码器正转,计数加1,如果是01,则相反。通过软件实现编码器信号的倍频鉴相和判断计数,最后完成角度换算。当前状态为11的程序流程如图5所示。
利用STM32较高的性能,实现软件四倍频鉴相计数,不但简化了电路结构,而且使系统开发方便、快捷、更具灵活性。在编码器相对运动一圈产生的15865个脉冲周期里,总共产生63460个周期性分频编码,由此可知,角度变化量△a与计数值n的关系:△a=n(6000/63460),单位为密位。角度在信号处理中需要使用Z相脉冲信号,在Z相脉冲产生中断时,角度计数清零,从而实现0密位的校正。
3 实验结果
根据上述方案,完成硬件电路设计和相关软件的调试。实验将磁柵尺在一个圆环上绕满一圈并固定在电机的旋转轴上,将磁头固定在圆环上方,最后对角度测量装置进行角度测量调试,并利用C+builder编写了上位机程序显示调试结果,上位机显示的测量结果如图6所示。从图中的结果可以看出本装置测量精度可以达到0.01密位,并且随着圆环的直径增大,精度将会越大

4结论
文中设计了一种基于磁柵位移传感器的高精度角度测量系统,详细介绍了系统的测量原理,给出了总体设计电路图,并通过实验表明该角度测量系统具有响应速度快、测量精度高等优点,具有很高的研究意义和市场价值。


